|
I am a Ph.D. student in the Department of Mechanical Engineering at UC Berkeley, where I am advised by Prof Negar Mehr. I am a part of the ICON lab. I started my Ph.D. at UIUC as a part of the Coordinated Science Laboratory. Later, I moved to UC Berkeley with my advisor, Prof Negar Mehr, starting in January 2024. Previously, I graduated from IIT Bombay with an interdisciplinary dual degree(Bachelor's in Aerospace Engineering + Master's in Systems and Control Engineering). During my stay at IIT Bombay, I was awarded Panasonic Scholarship, Undergraduate Research Award, and Technical Hostel's Commendation. Email / CV / Google Scholar / Twitter / Github |
|
|
I am interested in leveraging game theory, stochastic control, and machine learning to enable robotic multi-agent interactions and safe motion planning. As autonomy is getting integrated more with human lives, I wish to study the societal impact of autonomy. |
|
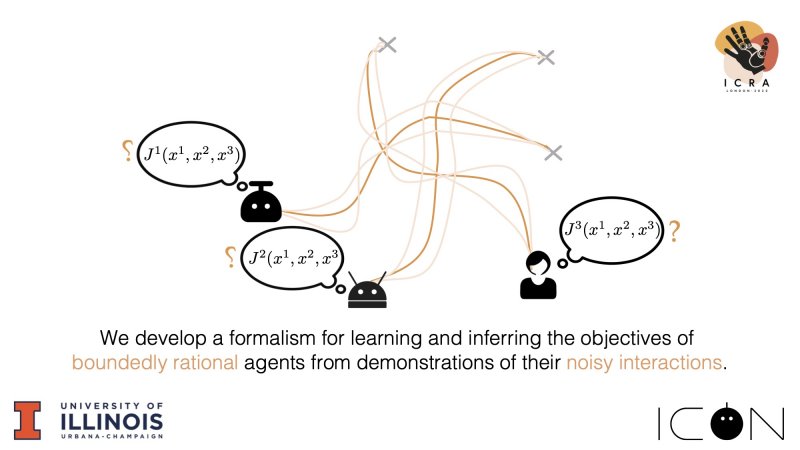
Negar Mehr, Mingyu Wang, Maulik Bhatt , Mac Schwager Transactions on Robotics, 2023 arXiv / video We introduce the notion of noisy Nash equilibrium and provide forward solutions and inverse solutions to estimate the objectives of the agents from demonstrations. |
|
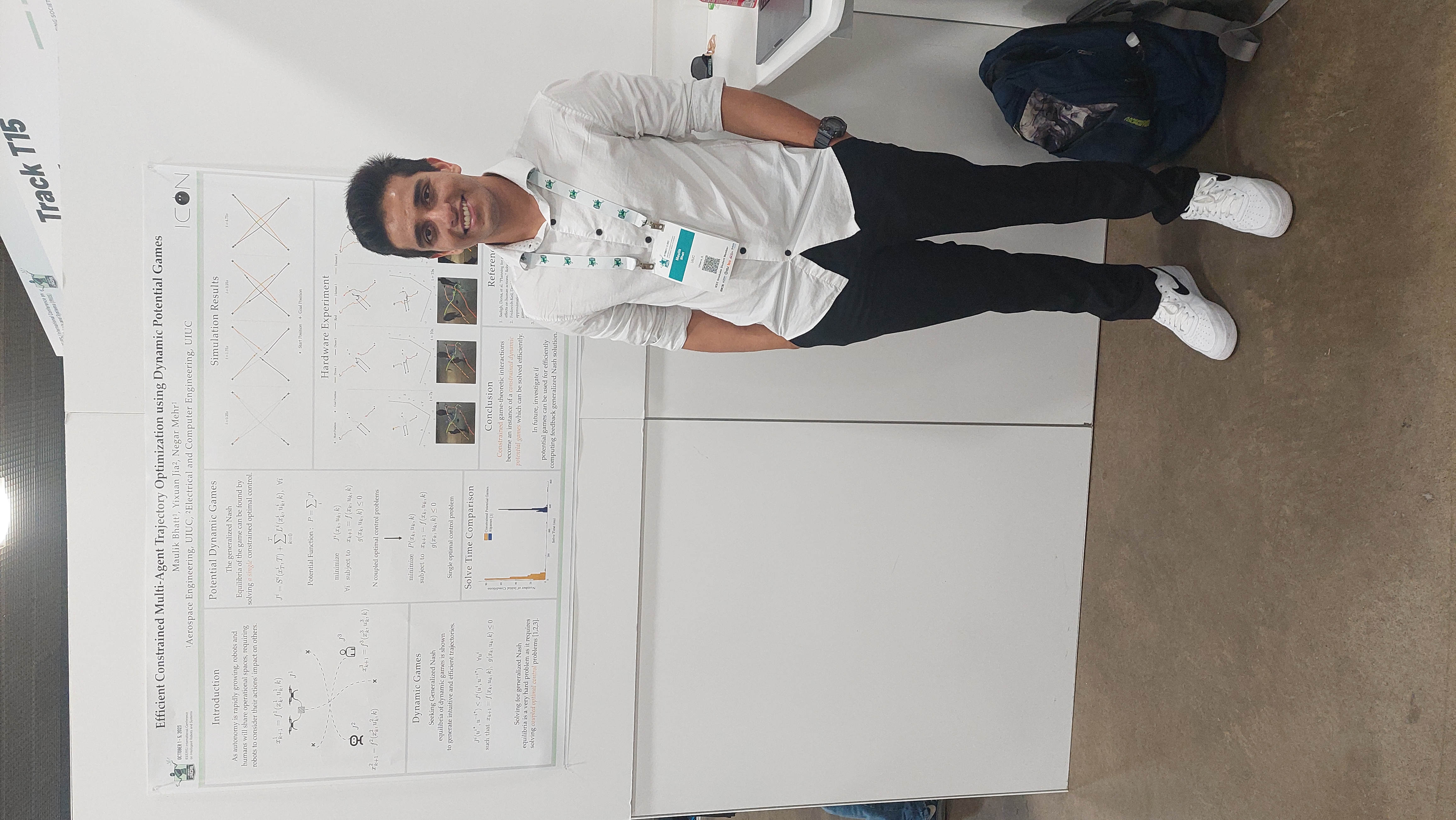
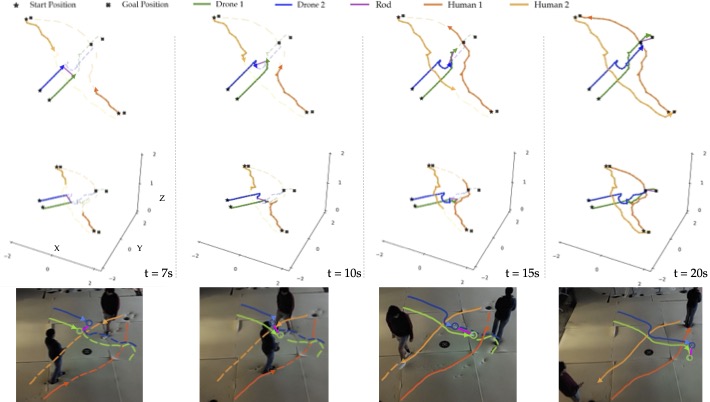
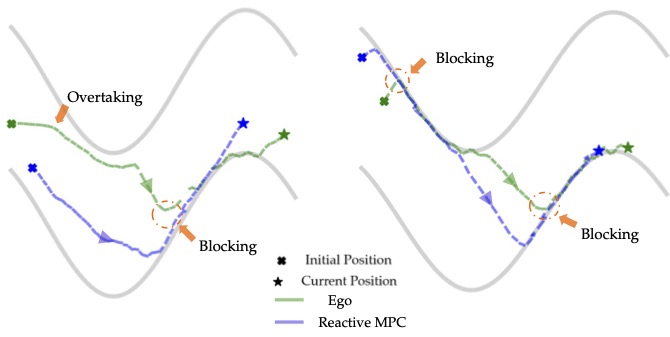
Maulik Bhatt , Yixuan Jia, Negar Mehr IROS, 2023 arXiv / video / code Our constrained trajectory planner is 20 times faster than the state-of-the-art |
|
Yixuan Jia, Maulik Bhatt , Negar Mehr Eurpean Control Conference, 2023 arXiv / video / code Our algorithm outperfroms the state-of-the-art. |
|
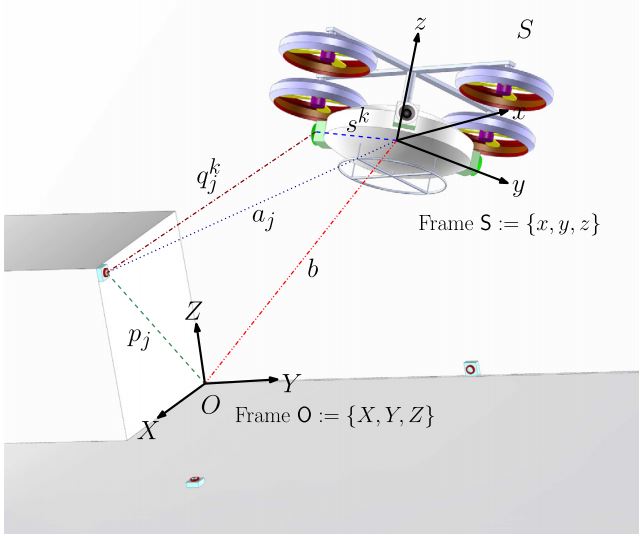
Maulik Bhatt , Srikant Sukumar, Amit K Sanyal Journal of Nonlinear Science- link To the best of our knowledge, this is the first pose estimator that is proven to be almost globally asymptotically stable in discrete-time |
|
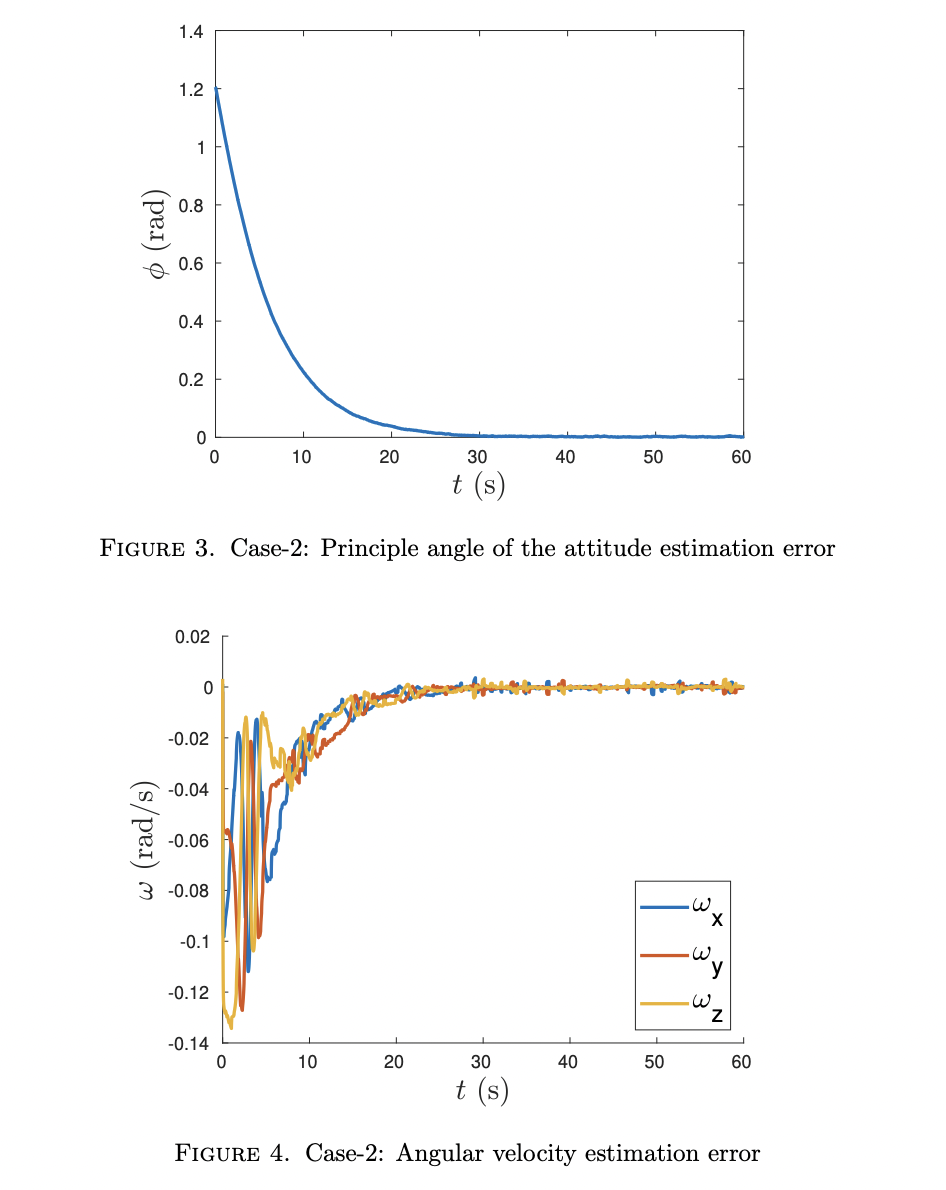
Maulik Bhatt , Amit K Sanyal, Srikant Sukumar Paper-1: 59th Conference on Decision and Control, 2020 - link Paper-2: Journal of Geometric Mechanics - link To the best of our knowledge, this is the first attitude estimator that is proven to be almost globally asymptotically stable in discrete-time and considers multi-rate measurements |
|
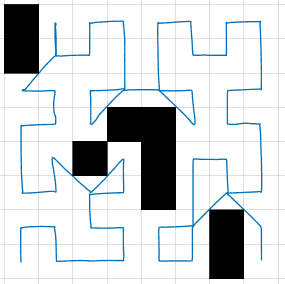
Anant Joshi, Maulik Bhatt , Arpita Sinha 6th Indian Control Conference (ICC), 2019 - link Link to experiment videos - Experiment-1, Experiment-2 Developed an algorithm to explore an unknown region while avoiding obstacles |
|
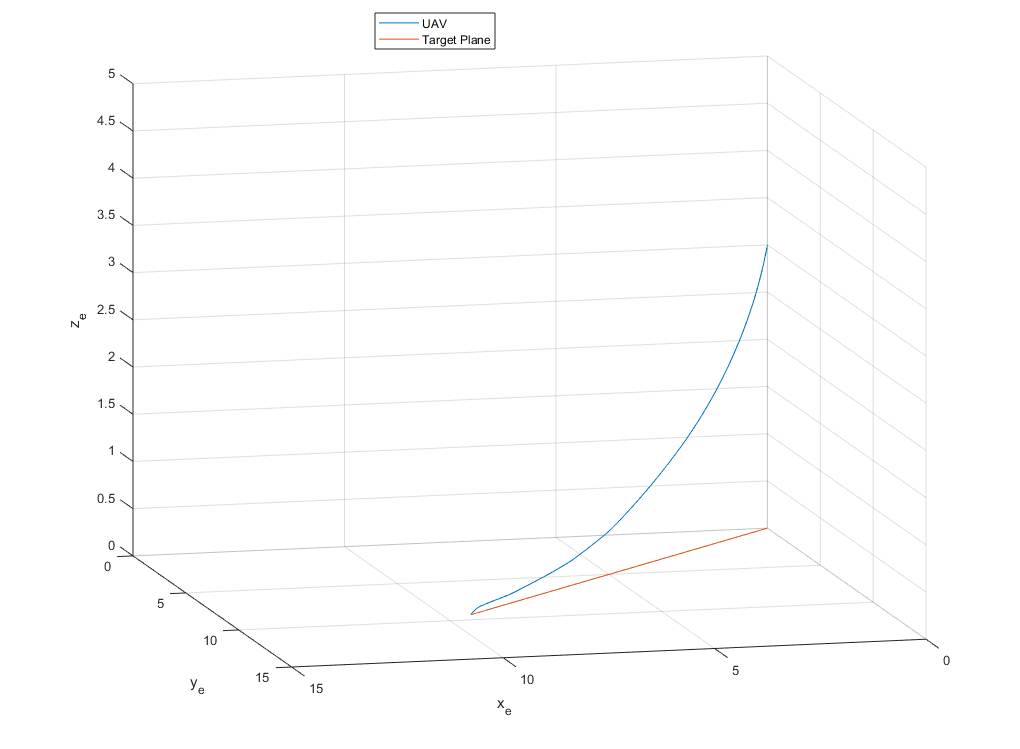
Maulik Bhatt, David Saussié Implemented a Dynamic Image-Based Visual Servo Control technique for safe autonomous landing of drone on moving ground vehicle |
|
Climbing, Hiking, Cooking, Flute |
|
Thanks to Jon Barron for the template. |